Are we being best served by the current definitions of autonomy for autonomous mobility. Are they helpful, do they convey sufficient information to support the delivery of autonomous mobility, and is there a common understanding as to what the levels mean and what is necessary. Should there be distinctions made that identify whether the vehicle is operating in a restricted or open environment, or the technology that is implemented bearing in mind that different technologies favour different operating parameters?
My first memory of a fully autonomous vehicle running a fully autonomous service was the Docklands Light Railway (DLR) which opened in August 1987. But the DLR is only GoA3 (Grade of Automation- Level 3) capable – identified as Driverless, requiring a DLR member of staff to always be present on every train and able to take over in case of emergencies.
GoA4 capable trains which are defined as fully autonomous and do not require any human intervention to remain safe, first made an appearance in the US during the early 1970’s, on typically airport shuttle runs.
Half a century later, it is unlikely anyone could have predicted the level of effort that has been expended on delivering more advanced autonomous mobility solutions, how such technology could impact us on a day-to-day basis, and how such technology is destined to improve the world around us, from a congestion, communication, emissions and potentially quality of life perspective.
In fact, some of the claims being made must leave some of us wondering why such technology isn’t being rolled out more aggressively.
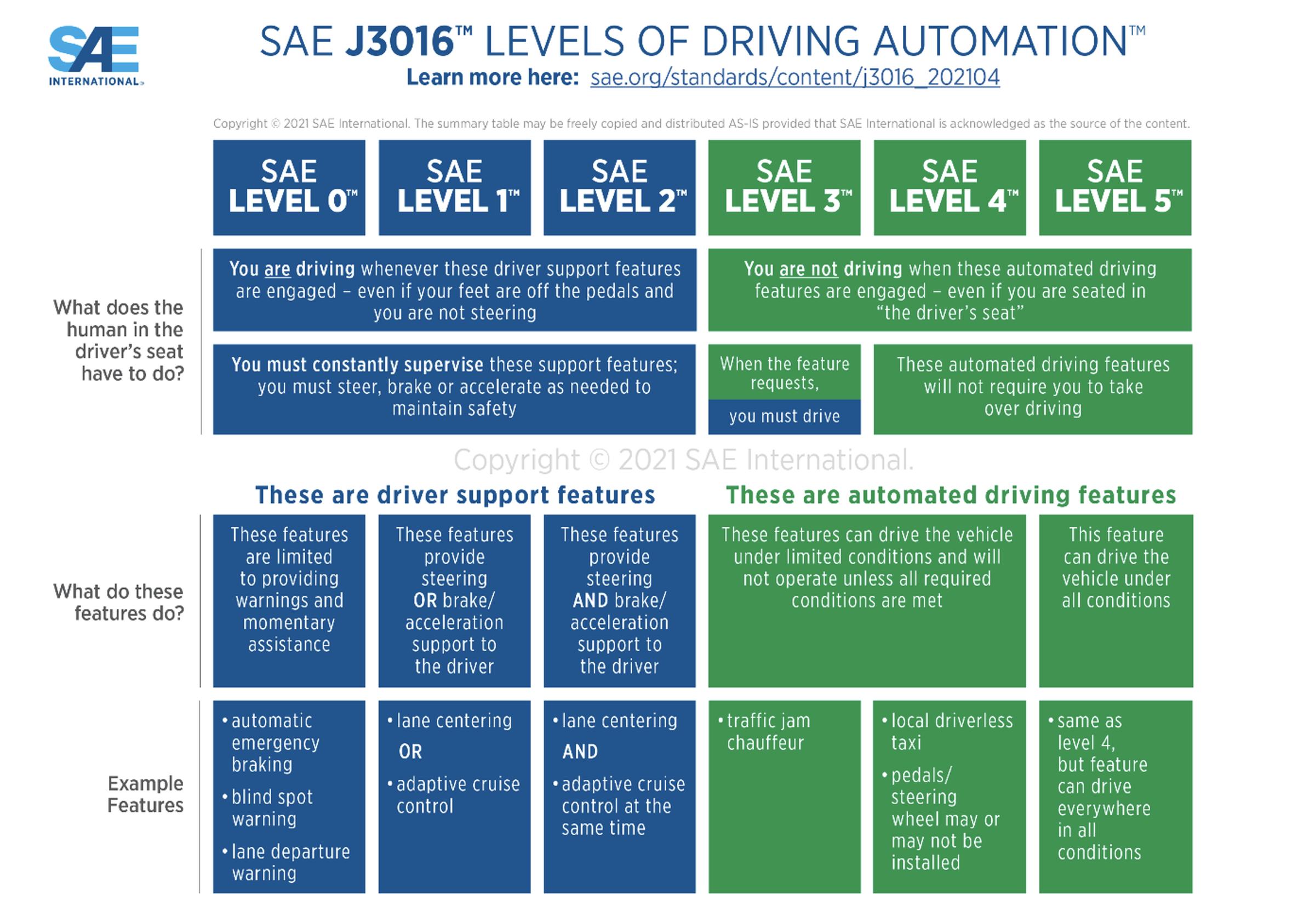
Tesla’s Autopilot, Ford’s Blue Cruise, GM’s Super Cruise and BMW’s Driver Assistant Pro are all operating at Level 2 autonomy (see graphic). In fact, the only Level 3 vehicle that is currently operating is a real-world environment is the Mercedes solution released in 2024 for the E-Class and S-Class sedans, and currently that’s only known to be available/certified in California where it is self-drive capable, and able to navigate without input in ideal conditions, which can vary between manufacturers and the technologies that they use.
There are also a couple of companies testing level 4 vehicles, most notably Oxa (formerly Oxbotica) and Waymo who is a subsidiary of Alphabet Inc, also the parent company of Google which offers paid taxi services in San Francisco with a safety officer/driver at the wheel, and of course Cruise a GM company which offers complete driverless operation in San Francisco at night.
It should be noted that at present there are no known Level 4 vehicles in road trials in the UK. Although the last time I said these words during a webinar, I was heavily critiqued, with someone suggesting that there were level 4 vehicles currently operating in the UK as the Heathrow Pods are level 4, and the same is true of the Capri Pods at Queen Elizabeth Olympic Park. This is correct, but these both operate in a segregated environment. What would happen if we transplanted these Pods into an open road mixed technology landscape, would they be successful interacting with other vehicles/modes and the unpredictability of other drivers? The answer is most probably not.
And, there lies just one of the issues with the current levels of autonomy as defined:
1. There is no reference to the application for which the autonomous vehicle will be used. Shouldn’t the level of autonomy also be linked to the application – as per the Heathrow pods, located in a dedicated area which is unexposed to people or other transport. Or within a dedicated service area, where the levels of interactions with other vehicles and/or obstacles is limited, or in a location like Abu Dhabi which has both autonomous taxis and shuttle buses which only run pre-defined routes, which most of the time are subject to limited vehicular interactions. Is it right or beneficial to assume that the level of autonomy for a Heathrow pod which is essentially on its own dedicated track is the same as a vehicle that is on an open road and integrating with other traffic?
Three of the areas that are most heavily utilising/experimenting with Automated Mobility at the moment are freight movement in ports, mining and farming. Singapore Port offers one of the biggest freight movement ports, who together with Venti have created a fully autonomous solution for the movement of containers around the port. While there is limited interaction with private road users the port requires the navigation of other freight vehicles both automated and manually driven.
There is no safety officer on board any vehicles, instead all traffic is monitored in real-time through a centralised control system, where each controller is monitoring multiple vehicles simultaneously and relying on the system to provide prompts when outside operating norms, or operating safety margins. However, it is unlikely that this current technology would be successful outside of the confines of a port or similar environment where more complicated interactions and situations need to be negotiated.
2. There is confusion on what level 4 autonomy means from a safety officer perspective. Up until recently the suggestion was that every vehicle had to have a safety officer on-board to take over in the event of an emergency. However, as per the example above, with the introduction of better communications, faster processing times, improved software, could a remote person be in a position to take over if an autonomous vehicle did have an emergency and could that same person monitor multiple vehicles simultaneously?
What would happen if, for example, the system suffered from total cellular data overload, or perhaps a tower went off-line? Well in most cases the default position of an autonomous vehicle is to pull over and stop, as we observed with the unfortunate incident involving a pedestrian and an autonomous vehicle in San Francisco where, a pedestrian was hit by a driven vehicle and pushed into the path of a fully autonomous vehicle.
Unfortunately, the Autonomous vehicles default position was after an incident to pull over to the side of the road and await emergency service, but in so doing caused more trauma to the victim.
The question posed after that incident is would there have been a different outcome if there had been a driver at the wheel? From my perspective autonomous vehicles are programmed to drive more safely than human driven vehicles, they are not in a hurry, are not prone to needing feeding or toilet breaks and the urgency that such situations may warrant, they aren’t eating drinking, talking on the phone, or distracted by another motorists antics, and in most cases because their default position is safety, they are quick to brake, perhaps quicker than their human driven counterpart.
But, do they have the same location awareness? Do they have the ability at this time to look multiple vehicles ahead to see whats happening in the intermediate surroundings, are they able to properly observe whats happening on the other side of a carriageway, are they aware of an emergency vehicle approaching from behind, or able to accommodate the unpredictability of pedestrians?
The answer to all these questions is probably not yet, but technology is likely to allow them to have this awareness in the future. But, it could be argued only by observing these vehicles in a real-world environment will we build vehicles that can at some time overcome these challenges.
3. What does Level 5 actually mean? Here’s where it gets really interesting, there are two very different schools of thought. On one hand there are those that suggest Level 5 means no requirement for any form of information or input from anything or anyone.
The opposite school of thought is that this is unreasonable, even drivers are constantly getting additional information thrust at them, from weather updates, road signage stating temporary road works, the claxon of an approaching emergency vehicle, the support in navigating a particular tricky junction, such as the magic roundabout in Swindon, where one is essentially forced to go round the central roundabout in an anticlockwise rotation. Is it reasonable to suggest that a level 5 autonomous vehicle can encounter every situation (some of which might not have been observed before) without any input, pre-programming, or information to support it? Probably not.
While much work is being undertaken on vehicle to everything (V2X) communication and vice versa, with trials of such things as GLOSA (Green Light Optimal Speed Advisory), which helps support a driver to travel at a constant speed to maintain green lights and therefore enhance traffic flow, or dynamic in-vehicle signage that can be presented as data to a connected vehicle or as a message to a human driver there has been limited if no UK assessment of what data is needed, and the communications channels and protocols that are required to successfully delivery Level 3-5 autonomy.
Some work was organised by science direct which suggested a large number of elements that would need some form of infrastructure to vehicle communication if AV’s were to be successful in the short-medium term.
4. Should the actual technology that is being used also form part of the level of autonomy definition? At present there are essentially three competing technologies that are being delivered in autonomous vehicles, LIDAR, 4D Radar and Machine Vision, all of which have pro’s and cons. LIDAR the most prevalent essentially shoots out about 3000 data points of light a second and depending on the reflective image, draws a map of its surroundings, the problem with this is that the light reflection tends to get distorted/supressed by bad weather ranging from fog, snow, rain and hail.
There have even been accounts of bright sunlight, reflections off puddles, and buildings, or even an errant crisp packet impacting the returns. The new Level 3 Mercedes utilises all three of these technologies, but still is neither rated for night operations or operation in rain. Yet Venti have overcome the same problems using LIDAR in Singapore Port using programming and what must probably be classed as AI to identify early reflected returns and discount those from the main picture that it builds, and this has been proven to work in even the most severe weather patterns including monsoon level rains.
From my point of view, the current levels of autonomy are neither broad enough nor specific enough to support the delivery of autonomous mobility. I firmly believe that autonomous mobility will eventually be the next disruptive technology, it will, if delivered correctly, revolutionise both passenger and freight transport, whilst reducing our reliance on privately owned vehicles, and therefore should be embraced, because all work undertaken now will support the earlier delivery of these major advantages.
There will need to be political, legislative, funding, standards, communication, change management hurdles to overcome, but at present the UK is being left behind in the drive to deliver Automated Mobility.
Yes, there are some trials that are currently being deployed, CAV Forth being a notable example, but again, we need to get the foundation in place to ensure that all such deployments do conform and will provide a stepping stone to Level 3, 4 and 5 autonomous mobility in our foreseeable future. This will require additional infrastructure, 5G rollout across at least our complete SRN (Strategic Road Network) some of which isn’t serviced by any comms technology currently.
We must confirm what data can and will be transmitted, and what data will be required to be made available to authorities to use (without cost). We must better define the Vehicle to Everything (V2X) data protocols, comms channels, and then redefine the levels of autonomy which in my view should be based around applications and use cases.
My objective in writing this series of articles on autonomous mobility is to stimulate a healthy debate on how we should approach this delivery of solutions. How we should perhaps support trials within a safety margin, and perhaps be a little more open minded to the opportunity to look at this problem from a holistic perspective. I welcome your views, including those which are at odds to mine, it is only through healthy debate and scientific investigation that we will make the right decisions to meet our future transport goals.
Find out more: https://www.systra.com/uk/services/future-mobility/connected-autonomous-vehicles/
TransportXtra is part of Landor LINKS
![]()
© 2025 TransportXtra | Landor LINKS Ltd | All Rights Reserved
Subscriptions, Magazines & Online Access Enquires
[Frequently Asked Questions]
Email: subs.ltt@landor.co.uk | Tel: +44 (0) 20 7091 7959
Shop & Accounts Enquires
Email: accounts@landor.co.uk | Tel: +44 (0) 20 7091 7855
Advertising Sales & Recruitment Enquires
Email: daniel@landor.co.uk | Tel: +44 (0) 20 7091 7861
Events & Conference Enquires
Email: conferences@landor.co.uk | Tel: +44 (0) 20 7091 7865
Press Releases & Editorial Enquires
Email: info@transportxtra.com | Tel: +44 (0) 20 7091 7875
Privacy Policy | Terms and Conditions | Advertise
Web design london by Brainiac Media 2020